부경대 연구팀, '뱀 로봇' 제어 연구로 우수 논문상
신정훈
입력 : 2024.03.05 10:16:51
입력 : 2024.03.05 10:16:51
(부산=연합뉴스) 신정훈 기자 = 국립부경대학교는 기계시스템공학 전공 서진호 교수 연구팀이 제19회 한국로봇종합학술대회(KRoC2024)에서 '뱀 로봇' 제어 연구로 우수논문상을 받았다고 5일 밝혔다.
연구팀은 최근 열린 학술대회에서 논문 'RBF 신경망과 강인 제어를 이용한 I-PID 기반 뱀 로봇 머리제어에 관한 연구'로 포스터 부문에서 우수한 평가를 받았다.
서진호 교수 연구팀은 이번 연구에서 협소한 공간을 탐색하는 등의 용도로 사용되는 뱀형 로봇에 인공지능 기법의 하나인 RBF 신경망과 시스템의 불확실성을 제어하는 이론 중 하나인 강인 제어(robust control)를 이용해 효과적인 머리제어 방법을 제시했다.
연구팀은 뱀형 로봇의 머리부 관절 일부를 독립적으로 제어하는 전략을 제시하고, 인공 신경망과 결합한 강인 제어 방법을 통해 뱀형 로봇이 주행 중에 발생하는 카메라 흔들림을 최소화하는 방법을 밝혔다.
서 교수는 "이번 연구가 모바일 로봇으로서 뱀형 로봇의 활용도를 높일 수 있는 기초 연구로 활용될 것으로 기대한다"라고 밝혔다.
한국로봇종합학술대회는 한국로봇학회와 한국로봇산업진흥원이 공동으로 로봇 분야의 다양한 공학 지식을 공유하고, 로봇 관련 학술 분야 확대를 위해 개최하는 국내 최대 규모 로봇 관련 학술대회다.
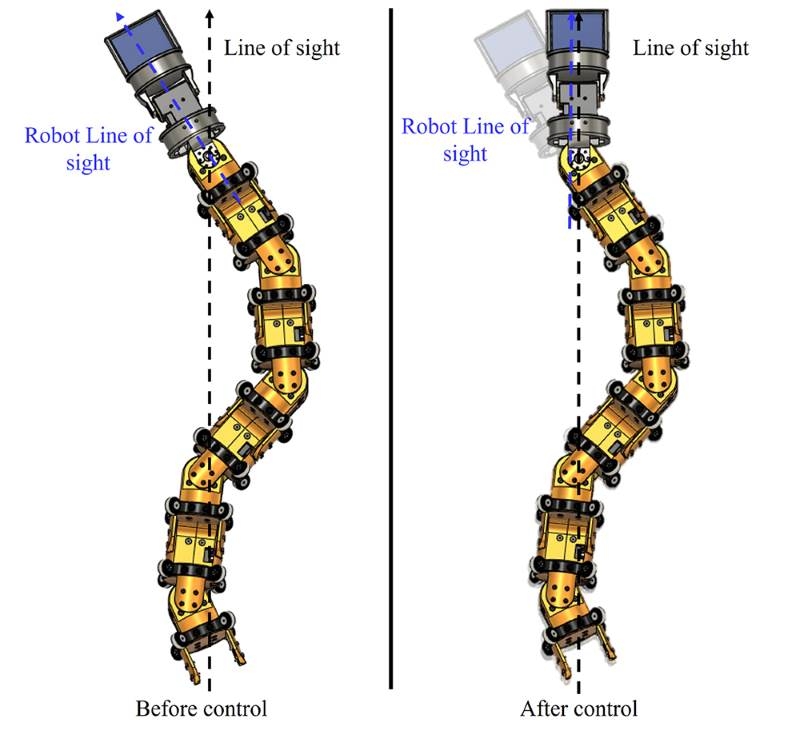
뱀형 로봇 머리부 제어 콘셉트 이미지
[국립부경대학교 제공]
sjh@yna.co.kr(끝)
연구팀은 최근 열린 학술대회에서 논문 'RBF 신경망과 강인 제어를 이용한 I-PID 기반 뱀 로봇 머리제어에 관한 연구'로 포스터 부문에서 우수한 평가를 받았다.
서진호 교수 연구팀은 이번 연구에서 협소한 공간을 탐색하는 등의 용도로 사용되는 뱀형 로봇에 인공지능 기법의 하나인 RBF 신경망과 시스템의 불확실성을 제어하는 이론 중 하나인 강인 제어(robust control)를 이용해 효과적인 머리제어 방법을 제시했다.
연구팀은 뱀형 로봇의 머리부 관절 일부를 독립적으로 제어하는 전략을 제시하고, 인공 신경망과 결합한 강인 제어 방법을 통해 뱀형 로봇이 주행 중에 발생하는 카메라 흔들림을 최소화하는 방법을 밝혔다.
서 교수는 "이번 연구가 모바일 로봇으로서 뱀형 로봇의 활용도를 높일 수 있는 기초 연구로 활용될 것으로 기대한다"라고 밝혔다.
한국로봇종합학술대회는 한국로봇학회와 한국로봇산업진흥원이 공동으로 로봇 분야의 다양한 공학 지식을 공유하고, 로봇 관련 학술 분야 확대를 위해 개최하는 국내 최대 규모 로봇 관련 학술대회다.
[국립부경대학교 제공]
sjh@yna.co.kr(끝)
증권 주요 뉴스
증권 많이 본 뉴스
매일경제 마켓에서 지난 2시간동안
많이 조회된 뉴스입니다.